



4. Kernefunktioner i BMS-software
l Målefunktion
(1) Grundlæggende informationsmåling: overvågning af batterispænding, strømsignal og batteripakketemperatur. Den mest grundlæggende funktion i batteristyringssystemet er at måle spænding, strøm og temperatur i battericellerne, hvilket er grundlaget for alle beregninger på overordnet niveau og kontrollogik i batteristyringssystemet.
(2) Detektering af isolationsmodstand: Hele batterisystemet og højspændingssystemet skal testes for isolering af batteristyringssystemet.
(3) Detektion af højspændingsinterlock (HVIL): bruges til at bekræfte integriteten af hele højspændingssystemet. Når integriteten af højspændingssystemets kredsløb er beskadiget, aktiveres sikkerhedsforanstaltninger.
lEstimeringsfunktion
(1) SOC- og SOH-estimering: den centrale og vanskeligste del
(2) Balancering: Juster SOC x kapacitetsubalancen mellem monomerer via et balanceringskredsløb.
(3) Batteristrømbegrænsning: Batteriets indgangs- og udgangseffekt er begrænset ved forskellige SOC-temperaturer.
lAndre funktioner
(1) Relæstyring: inklusive hoved +, hoved-, laderelæ +, laderelæ -, forladerelæ
(2) Termisk kontrol
(3) Kommunikationsfunktion
(4) Fejldiagnose og alarm
(5) Fejltolerant drift
5.Kernefunktioner i BMS-software
lMålefunktion
(1) Grundlæggende informationsmåling: overvågning af batterispænding, strømsignal og batteripakketemperatur. Den mest grundlæggende funktion i batteristyringssystemet er at måle spænding, strøm og temperatur i battericellerne, hvilket er grundlaget for alle beregninger på overordnet niveau og kontrollogik i batteristyringssystemet.
(2) Detektering af isolationsmodstand: Hele batterisystemet og højspændingssystemet skal testes for isolering af batteristyringssystemet.
(3) Detektion af højspændingsinterlock (HVIL): bruges til at bekræfte integriteten af hele højspændingssystemet. Når integriteten af højspændingssystemets kredsløb er beskadiget, aktiveres sikkerhedsforanstaltninger.
lEstimeringsfunktion
(1) SOC- og SOH-estimering: den centrale og vanskeligste del
(2) Balancering: Juster SOC x kapacitetsubalancen mellem monomerer via et balanceringskredsløb.
(3) Batteristrømbegrænsning: Batteriets indgangs- og udgangseffekt er begrænset ved forskellige SOC-temperaturer.
lAndre funktioner
(1) Relæstyring: inklusive hoved +, hoved-, laderelæ +, laderelæ -, forladerelæ
(2) Termisk kontrol
(3) Kommunikationsfunktion
(4) Fejldiagnose og alarm
(5) Fejltolerant drift
6.BMS-softwarearkitektur
lHøj- og lavspændingsstyring
Når den normalt er tændt, vækkes BMS'en af VCU'en via et direkte linje- eller CAN-signal på 12V. Når BMS'en har gennemført selvtesten og går i standby, sender VCU'en en højspændingskommando, og BMS'en styrer lukningen af relæet for at fuldføre højspændingsforbindelsen. Når den er slukket, sender VCU'en en lavspændingskommando og afbryder derefter 12V-opvågningen. Når pistolen indsættes for opladning i slukket tilstand, kan den vækkes af CP- eller A+-signalet.
lOpladningsstyring
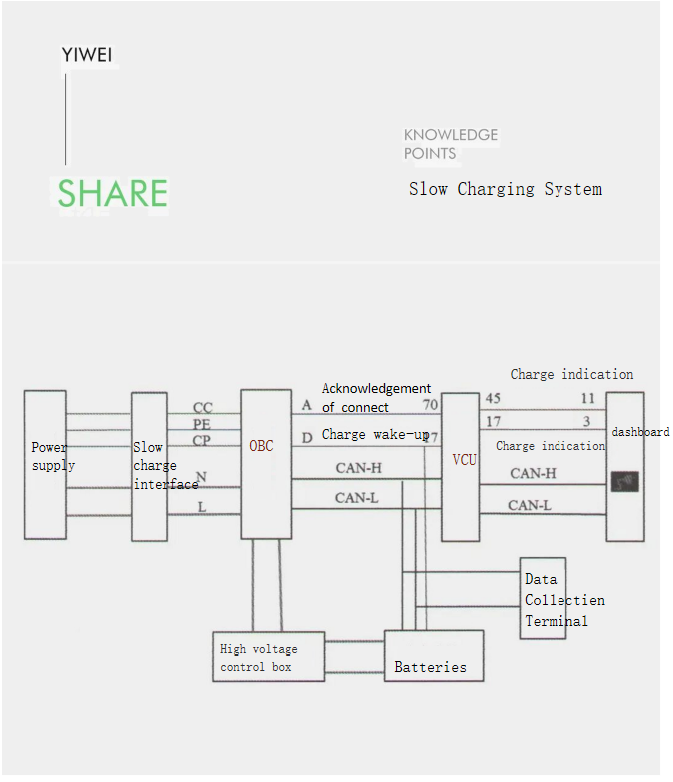
(1) Langsom opladning
Langsom opladning er at oplade batteriet med jævnstrøm, der konverteres fra vekselstrøm via den indbyggede oplader i ladesøjlen (eller 220V strømforsyning). Ladesøjlens specifikationer er generelt 16A, 32A og 64A, og den kan også oplades via en almindelig strømforsyning. BMS'en kan vækkes af CC- eller CP-signalet, men det skal sikres, at den kan sove normalt, når opladningen er afsluttet. AC-opladningsprocessen er relativt enkel og kan udvikles i overensstemmelse med detaljerede nationale standarder.
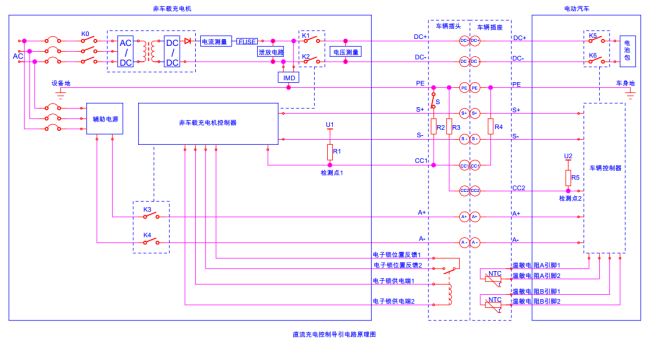
(2) Hurtig opladning
Hurtigopladning er at oplade batteriet med jævnstrøm fra DC-opladestaven, hvilket kan opnå en opladningshastighed på 1C eller endda højere. Generelt kan 80% af batteriet oplades på 45 minutter. Det kan aktiveres af hjælpestrømkildens A+ signal fra opladestaven.
lEstimeringsfunktion
(1) SOP (State of Power) indsamler primært det aktuelle batteris tilgængelige opladnings- og afladningseffekt ved at søge i tabeller via temperatur og SOC. VCU'en bestemmer, hvordan hele køretøjet bruges, baseret på den sendte effektværdi.
(2) SOH (State of Health) karakteriserer primært batteriets aktuelle sundhedstilstand med en værdi mellem 0-100%. Det anses generelt for, at batteriet ikke kan bruges, når det er faldet til under 80%.
(3) SOC (State of Charge) tilhører BMS'ens kernekontrolalgoritme, som karakteriserer den aktuelle resterende kapacitetsstatus. Den er hovedsageligt baseret på ampere-time-integralmetoden og EKF-algoritmen (udvidet Kalman-filter) kombineret med korrektionsstrategier (såsom korrektion af åben kredsløbsspænding, korrektion af fuld opladning, korrektion ved opladningsslut, korrektion af kapacitet under forskellige temperaturer og SOH osv.).
(4) SOE (State of Energy) algoritmen er ikke bredt udviklet af indenlandske producenter eller bruger relativt simple algoritmer til at finde forholdet mellem den resterende energi under den aktuelle tilstand og den maksimalt tilgængelige energi. Denne funktion bruges primært til at estimere den resterende rækkevidde.
lFejldiagnose
Forskellige fejlniveauer skelnes afhængigt af batteriets forskellige ydeevne, og BMS og VCU foretager forskellige behandlingsforanstaltninger under forskellige fejlniveauer, såsom advarsler, strømbegrænsning eller direkte afbrydelse af højspænding. Fejl omfatter dataindsamlings- og rationalitetsfejl, elektriske fejl (sensorer og aktuatorer), kommunikationsfejl og batteristatusfejl osv.
1.Kernefunktioner i BMS-software
lMålefunktion
(1) Grundlæggende informationsmåling: overvågning af batterispænding, strømsignal og batteripakketemperatur. Den mest grundlæggende funktion i batteristyringssystemet er at måle spænding, strøm og temperatur i battericellerne, hvilket er grundlaget for alle beregninger på overordnet niveau og kontrollogik i batteristyringssystemet.
(2) Detektering af isolationsmodstand: Hele batterisystemet og højspændingssystemet skal testes for isolering af batteristyringssystemet.
(3) Detektion af højspændingsinterlock (HVIL): bruges til at bekræfte integriteten af hele højspændingssystemet. Når integriteten af højspændingssystemets kredsløb er beskadiget, aktiveres sikkerhedsforanstaltninger.
lEstimeringsfunktion
(1) SOC- og SOH-estimering: den centrale og vanskeligste del
(2) Balancering: Juster SOC x kapacitetsubalancen mellem monomerer via et balanceringskredsløb.
(3) Batteristrømbegrænsning: Batteriets indgangs- og udgangseffekt er begrænset ved forskellige SOC-temperaturer.
lAndre funktioner
(1) Relæstyring: inklusive hoved +, hoved-, laderelæ +, laderelæ -, forladerelæ
(2) Termisk kontrol
(3) Kommunikationsfunktion
(4) Fejldiagnose og alarm
(5) Fejltolerant drift
2.BMS-softwarearkitektur
lHøj- og lavspændingsstyring
Når den normalt er tændt, vækkes BMS'en af VCU'en via et direkte linje- eller CAN-signal på 12V. Når BMS'en har gennemført selvtesten og går i standby, sender VCU'en en højspændingskommando, og BMS'en styrer lukningen af relæet for at fuldføre højspændingsforbindelsen. Når den er slukket, sender VCU'en en lavspændingskommando og afbryder derefter 12V-opvågningen. Når pistolen indsættes for opladning i slukket tilstand, kan den vækkes af CP- eller A+-signalet.
lOpladningsstyring
(1) Langsom opladning
Langsom opladning er at oplade batteriet med jævnstrøm, der konverteres fra vekselstrøm via den indbyggede oplader i ladesøjlen (eller 220V strømforsyning). Ladesøjlens specifikationer er generelt 16A, 32A og 64A, og den kan også oplades via en almindelig strømforsyning. BMS'en kan vækkes af CC- eller CP-signalet, men det skal sikres, at den kan sove normalt, når opladningen er afsluttet. AC-opladningsprocessen er relativt enkel og kan udvikles i overensstemmelse med detaljerede nationale standarder.
(2) Hurtig opladning
Hurtigopladning er at oplade batteriet med jævnstrøm fra DC-opladestaven, hvilket kan opnå en opladningshastighed på 1C eller endda højere. Generelt kan 80% af batteriet oplades på 45 minutter. Det kan aktiveres af hjælpestrømkildens A+ signal fra opladestaven.
lEstimeringsfunktion
(1) SOP (State of Power) indsamler primært det aktuelle batteris tilgængelige opladnings- og afladningseffekt ved at søge i tabeller via temperatur og SOC. VCU'en bestemmer, hvordan hele køretøjet bruges, baseret på den sendte effektværdi.
(2) SOH (State of Health) karakteriserer primært batteriets aktuelle sundhedstilstand med en værdi mellem 0-100%. Det anses generelt for, at batteriet ikke kan bruges, når det er faldet til under 80%.
(3) SOC (State of Charge) tilhører BMS'ens kernekontrolalgoritme, som karakteriserer den aktuelle resterende kapacitetsstatus. Den er hovedsageligt baseret på ampere-time-integralmetoden og EKF-algoritmen (udvidet Kalman-filter) kombineret med korrektionsstrategier (såsom korrektion af åben kredsløbsspænding, korrektion af fuld opladning, korrektion ved opladningsslut, korrektion af kapacitet under forskellige temperaturer og SOH osv.).
(4) SOE (State of Energy) algoritmen er ikke bredt udviklet af indenlandske producenter eller bruger relativt simple algoritmer til at finde forholdet mellem den resterende energi under den aktuelle tilstand og den maksimalt tilgængelige energi. Denne funktion bruges primært til at estimere den resterende rækkevidde.
lFejldiagnose
Forskellige fejlniveauer skelnes afhængigt af batteriets forskellige ydeevne, og BMS og VCU foretager forskellige behandlingsforanstaltninger under forskellige fejlniveauer, såsom advarsler, strømbegrænsning eller direkte afbrydelse af højspænding. Fejl omfatter dataindsamlings- og rationalitetsfejl, elektriske fejl (sensorer og aktuatorer), kommunikationsfejl og batteristatusfejl osv.
Kontakt os:
yanjing@1vtruck.com +(86)13921093681
duanqianyun@1vtruck.com +(86)13060058315
liyan@1vtruck.com +(86)18200390258
Udsendelsestidspunkt: 12. maj 2023



